5.1. Объемное регулирование
5. СПОСОБЫ РЕГУЛИРОВАНИЯ ОБЪЕМНЫХ ГИДРОПРИВОДОВ
Для объемных гидроприводов регулируемым параметром является скорость движения выходного звена гидропривода (штока гидроцилиндра, вала гидромотора), которая может изменяться по заданному закону или желанию оператора.
Для регулирования скорости движения выходного звена гидропривода применяется объемное (машинное) или дроссельное регулирование, либо сочетание этих видов регулирования (комбинированное регулирование).
5.1. Объемное регулирование
Объемное регулирование скорости движения выходного звена гидропривода заключается в изменении рабочих объемов гидромашин и может осуществляться следующими тремя способами (рис. 5.1):
а) изменением рабочего объема насоса (регулируемым насосом);
б) изменением рабочего объема гидромотора (регулируемым гидромотором);
в) изменением рабочих объемов и насоса и гидромотора (регулируемым насосом и гидромотором).
Первый способ (рис. 5.1, а) является самым распространенным и может применяться как в гидроприводах вращательного действия, так и в гидроприводах поступательного и поворотного действия. Два других способа (рис. 5.1, б, в) применяются только в гидроприводах вращательного действия. Объемное регулирование в гидроприводах с разомкнутой циркуляцией рабочей жидкости применяется реже, чем в гидроприводах с замкнутой циркуляцией рабочей жидкости.
Принцип действия гидропривода с регулируемым насосом (рис. 5.1, а) заключается в следующем. Основной насос Н1 подает рабочую жидкость по напорной гидролинии в гидромотор М, вал которого под действием крутящего момента от сил давления жидкости вращается в определенном направлении. Из гидромотора рабочая жидкость по сливной гидролинии снова поступает в насос. Давление в гидросистеме зависит от нагрузки гидромотора.
|
а) |
б)
в) |
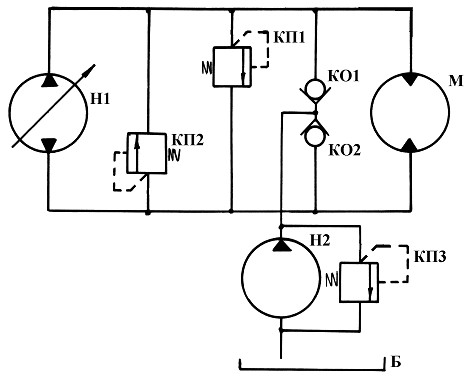
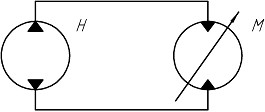

Рис. 5.1. Схемы гидроприводов с объемным регулированием
Частоту вращения вала гидромотора регулируют, изменяя рабочий объем насоса, а направление вращения вала гидромотора изменяют благодаря реверсированию потока рабочей жидкости. В результате реверсирования потока жидкости функции гидролиний меняются.
Предохранительные клапаны КП1 и КП2 защищают гидросистему от перегрузок как при прямом направлении вращения, так и при реверсировании. При этом выполняет свои функции тот клапан, который соединен с напорной гидролинией.
Компенсация утечек рабочей жидкости обеспечивается дополнительной гидросистемой подпитки. В эту систему входит насос подпитки Н2, переливной клапан КП3, поддерживающий постоянное давление подпитки 0,3…0,5 МПа, два обратных клапана КО1 и КО2, включенных параллельно гидромотору.
Подпитка всегда происходит в сторону сливной гидролинии, поэтому одновременно с подпиткой производится подпор рабочей жидкости в сливной гидролинии, что существенно улучшает условия работы насоса Н1 на всасывание.
Упрощенные схемы объемного регулирования гидроприводов с регулируемым гидромотором и с регулируемыми насосом и гидромотором показаны на рис. 5.1, б и рис. 5.1., в соответственно.
Теоретическую (расчетную) частоту вращения вала гидромотора в рассматриваемых гидроприводах определяют (без учета утечек жидкости) из условий равенства подачи насоса и расхода жидкости через гидромотор, т.е.:
 ,
,
или
 , (5.1)
, (5.1)
где Qн – подача насоса, м3/с; Qм – расход жидкости через гидромотор, м3/с; qн, qм – рабочие объемы насоса и гидромотора соответственно, м3; nн, nм – частоты вращения вала насоса и гидромотора, с-1, nн = const.
Из формулы (5.1) найдем выражение для частоты вращения вала гидромотора:
 . (5.2)
. (5.2)
Формула (5.2) показывает, что частоту вращения вала гидромотора (при постоянной частоте вращения вала насоса) можно регулировать, изменяя рабочие объемы насоса и гидромотора.
Диапазон регулирования скорости движения выходного звена определяется отношением ее максимального значения к минимальному, например, для гидромотора:
 , (5.3)
, (5.3)
где D – диапазон регулирования;  ,
,  – максимальная и минимальная частота вращения вала гидромотора.
– максимальная и минимальная частота вращения вала гидромотора.
Диапазон регулирования у гидропривода с регулируемым насосом и нерегулируемым гидромотором составляет более 50:1, у гидропривода с регулируемым гидромотором и нерегулируемым насосом – 5:1. В гидроприводе с регулируемыми насосом и гидромотором общий диапазон регулирования может достигать в отдельных случаях значения 500:1 и более.
Рассмотрим некоторые особенности рассмотренных трех способов объемного регулирования.
Регулирование изменением рабочего объема насоса обеспечивает постоянный крутящий момент на валу гидромотора и переменное потребление мощности (рис. 5.2, а). Такой способ регулирования используется при пуске машин, когда необходим большой крутящий момент, он используется, например, в грузоподъемных механизмах.
Основные параметры гидропривода с регулируемым насосом определяется по следующим формулам (при отсутствии утечек жидкости, потерь давления и мощности, и с учетом следующих условий nн = nм = const; nн = const; qм = const ):
 ;
;
 ; (5.4)
; (5.4)
 ,
,
где Nн, Nм – мощность насоса и гидромотора, Вт; Qн – подача насоса, м3/с, Qн = qн nн; pн, pм – рабочее давление насоса, гидромотора, Па; Мм – крутящий момент на валу гидромотора, Н×м.
Регулирование изменением рабочего объема гидромотора применяются значительно реже, чем регулирование изменением рабочего объема насоса. Достоинством этого способа является возможность регулирования при постоянной потребляемой мощности. Недостаток же состоит в том, что с уменьшением рабочего объема гидромотора уменьшается крутящий момент, что приводит к уменьшению диапазона устойчивой работы из-за необходимости преодоления момента внутреннего трения (самоторможение гидромотора). Кроме того, сложно управление гидромоторами в случае их значительного удаления от операторов.
Основные параметры такого гидропривода определяются по формулам (при отсутствии, утечек жидкости, потерь давления и мощности и с учетом следующих условий: pн = const, pн = pм = const; qн = const):
 ;
;
 ; (5.5)
; (5.5)
 .
.
На рис. 5.2, б показаны характеристики гидропривода с регулируемым гидромотором.
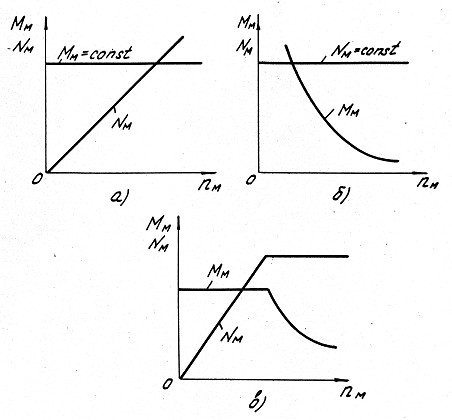
Рис. 5.2. Характеристики объемного способа регулирования
Применение регулируемых насоса и гидромотора позволяет значительно расширить диапазон регулирования частоты вращения и момента, развиваемого гидромотором. Обеспечение такой характеристики, как показано на рис. 5.2, в, дает возможность использовать этот гидропривод в транспортных средствах, где необходимо осуществлять трогание машины с большим крутящим моментом при очень малой скорости. Изменение скорости при разгоне машины осуществляется увеличением объема насоса при возрастающей мощности. Дальнейшее увеличение скорости машины осуществляется при постоянной мощности путем уменьшения рабочего объема гидромотора.
На мобильных машинах объемное регулирование широко используется в гидроприводах с замкнутой циркуляцией рабочей жидкости и с реверсивными регулируемыми аксиально-поршневыми насосами, оснащенными регуляторами мощности.
Гидроприводы с регулируемыми гидромашинами обеспечивают бесступенчатое, плавное и достаточно точное регулирование скорости выходного звена.
При объемном способе регулирования возможно максимальное использование мощности приводного двигателя. Поскольку гидравлические потери гидроприводов с объемным регулированием малы из-за отсутствия дросселирования потока рабочей жидкости, то КПД их сравнительно высок (h = 0,75…0,80).
Благодаря перечисленным преимуществам этот способ объемного регулирования является наиболее эффективным и применяется в гидроприводах средней и большой мощности (обычно свыше 5…10 кВт).
К основным недостаткам гидроприводов с объемным регулированием относится сложность регулируемых гидромашин, которые значительно дороже нерегулируемых. Кроме того, для перемещения элементов регулирования гидромашин (для изменения рабочих объемов) требуются специальные устройства дистанционного управления, которые усложняют гидропривод. Поэтому, если гидропривод имеет сравнительно небольшую мощность, или, если регулирование осуществляется в течение небольшого промежутка времени по сравнению с рабочими циклами, целесообразнее применять дроссельное регулирование скорости.