
8.2. Принцип действия
8. СЛЕДЯЩИЙ ГИДРОПРИВОД
8.2. Принцип действия
Принципиальная схема простейшего однокаскадного следящего гидропривода с жесткой кинематической обратной связью показана на рис. 8.1.
Следящий гидропривод состоит из задающего устройства (ручки управления) 1, рычага 2, дросселирующего гидрораспределителя 3 с нулевым перекрытием, гидроцилиндра 4 с поршнем 5 и штоком 6.
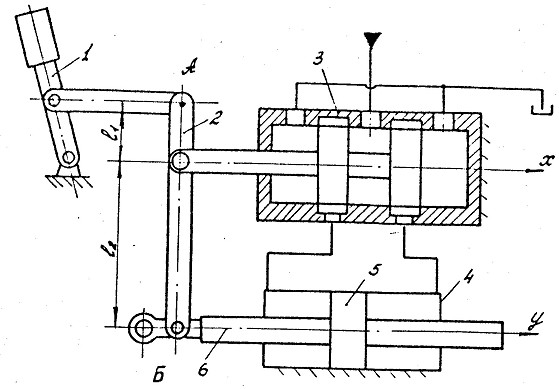
Рис. 8.1 Принципиальная схема следящего привода
К гидрораспределителю, соединенному гидролиниями с полостями гидроцилиндра, подключены гидролинии нагнетания и слива. Рычаг 2 связывает шток гидроцилиндра с золотником гидрораспределителя. Шток 6 гидроцилиндра связан также с исполнительным механизмом.
При повороте ручки управления 1 вправо повернется относительно точки Б рычаг 2, который сместит вправо золотник гидрораспределителя 3 и рабочая жидкость начнет от насоса поступать в правую полость гидроцилиндра 4, а из левой полости гидроцилиндра будет вытесняться в сливную гидролинию.
Поршень 5 гидроцилиндра под действием сил давления жидкости сместиться влево и повернет рычаг 2 относительно точки А, при этом золотник гидрораспределителя 3 также сместится влево, перекроет гидролинии и поршень 5 со штоком остановятся. Здесь поршень 5 гидродвигателя «следит» за движением золотника, а обратная связь между ними осуществляется с помощью рычага 2.
При повороте ручки управления и смещения золотника в противоположную сторону движение всех элементов будет происходить в обратном направлении.
Информацию о положении исполнительного органа выдает золотнику в рассматриваемой схеме рычаг 2 обратной связи, который и устанавливает золотник в процессе слежения в нейтральное положение. В результате такой отрицательной обратной связи исполнительный механизм (выход) воспроизводит в заданном масштабе движение органа управления (входа).
Выше было приведено упрошенное объяснение работы простейшего гидравлического следящего привода, при котором не учитывалась инерция подвижных элементов привода, а также упругость передающих движение звеньев, например, рабочей жидкости, которые существенно влияют на движение привода в процессе восстановления равновесия.
Связь между задающим воздействием (перемещением) х(t) золотника и перемещением y(t) штока гидроцилиндра определяется уравнением обратной связи:
 , (8.1)
, (8.1)
где  – рассогласование; kо.с. – коэффициент обратной связи,
– рассогласование; kо.с. – коэффициент обратной связи,  , здесь
, здесь  и
и  – длины плеч рычага.
– длины плеч рычага.
Рассмотренный пример показывает, что в общем случае гидравлический следящий привод с усилителем (в котором производится усиление мощности входного сигнала за счет энергии внешнего источника питания) имеет звенья, связанные в структурную схему, показанную на рис. 8.2.
Одним из основных требований, предъявляемых к гидравлическому следящему приводу, является обеспечения точности и чувствительности, под которыми понимают комплекс качеств, характеризующих способность привода воспроизводить с минимальной ошибкой (по времени и пути) перемещения выхода в соответствии с заданным перемещением входа, причем ошибка по времени характеризует быстродействие, а по пути – точность системы.
На рис. 8.3. приведены графики, характеризующие рассматриваемые качества следящего гидропривода. График зависимости х = х(t) показывает, что перемещение входа (золотника распределителя) на пути х1 от нейтрального положения (соответствует времени t1 от начала движения входа) не сопровождается движением выхода (штока гидроцилиндра). Этот путь характеризует зону нечувствительности системы.
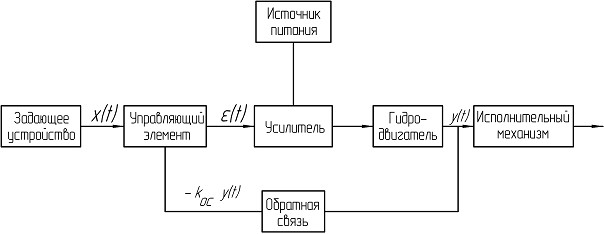
Рис. 8.2. Структурная схема следящего гидропривода
При дальнейшем перемещении входа приходит в движение выход, однако скорость его устанавливается лишь после прохождения входом некоторого пути х2 (соответствует времени t2). В равной мере движение выхода в конце рабочего хода прекратится лишь по истечении некоторого времени после остановки входа, характеризуемого отрезком t3.
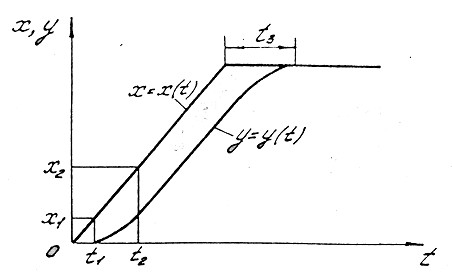
Рис. 8.3. Зависимости перемещения входа и выхода
следящего гидропривода от времени
Рассмотренное рассогласование в перемещениях входа и выхода (путевая ошибка) определяет ошибку (погрешность) слежения. Погрешность слежения обусловлена рядом факторов и в первую очередь коэффициентом обратной связи, характеризующим передаточное число кинематической цепи обратной связи. Кроме этого, на погрешность слежения влияют герметичность системы, люфты в ее механических узлах, нагрузки и скорости выхода и ряд прочих факторов.